To advance the safety and reliability of autonomous driving systems through formal method, we have undertaken the following research projects.
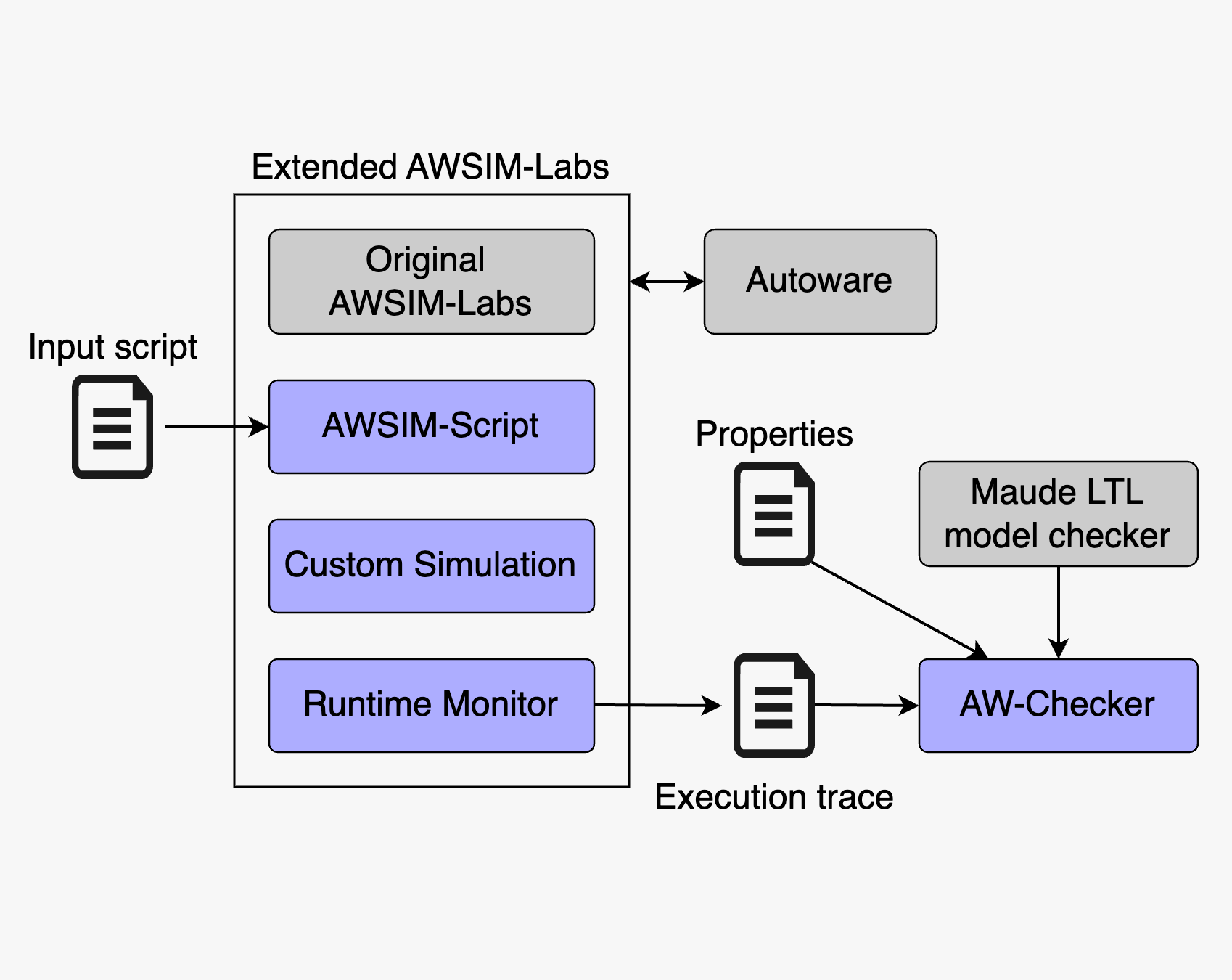
We propose a framework for runtime verification of ADSs, comprising a scenario description language, a runtime monitor, and an LTL property checker.
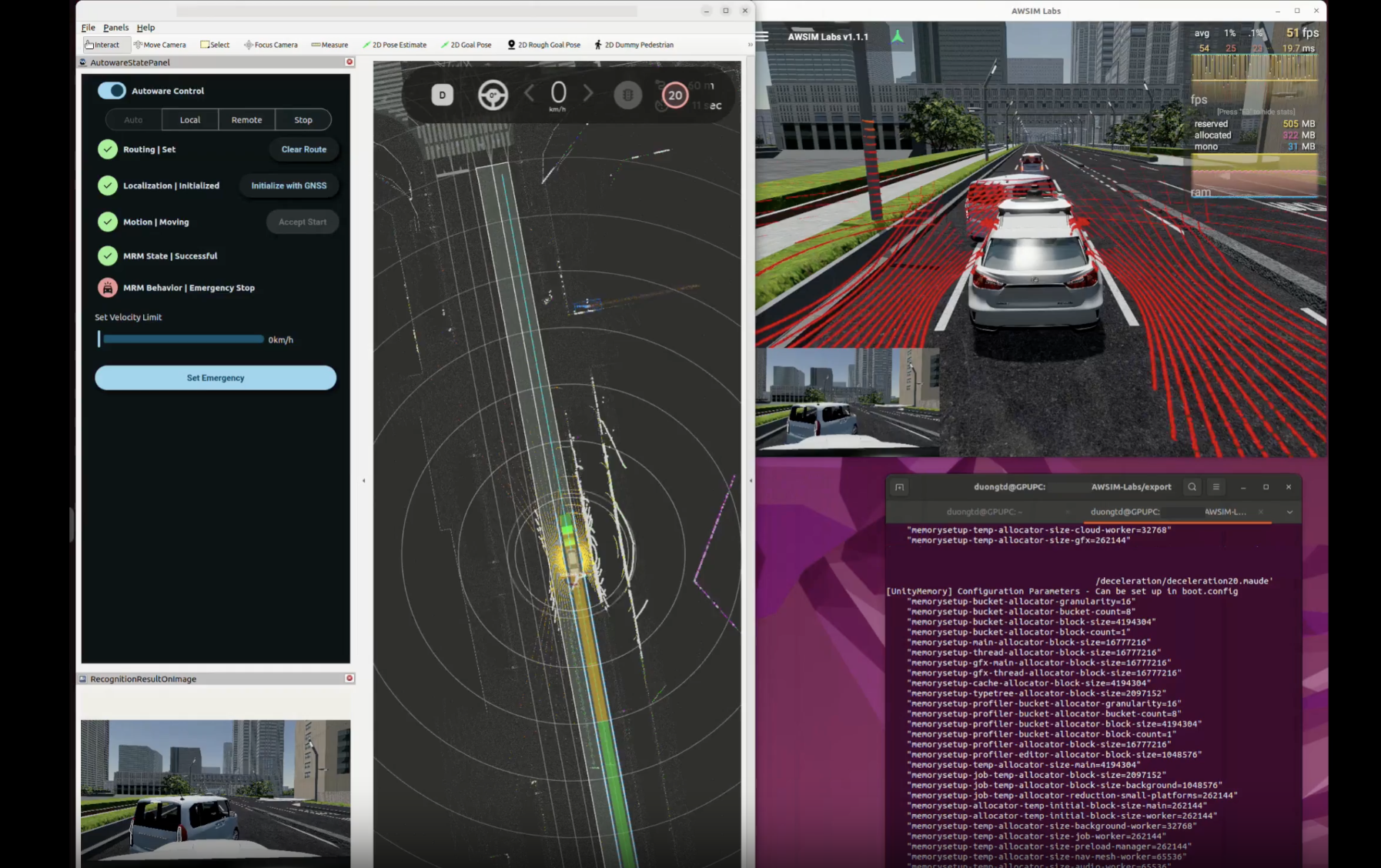
We evaluate the safety of Autoware, a leading ADS platform, in the three traffic disturbance scenarios, leveraging our Runtime Verification Framework.
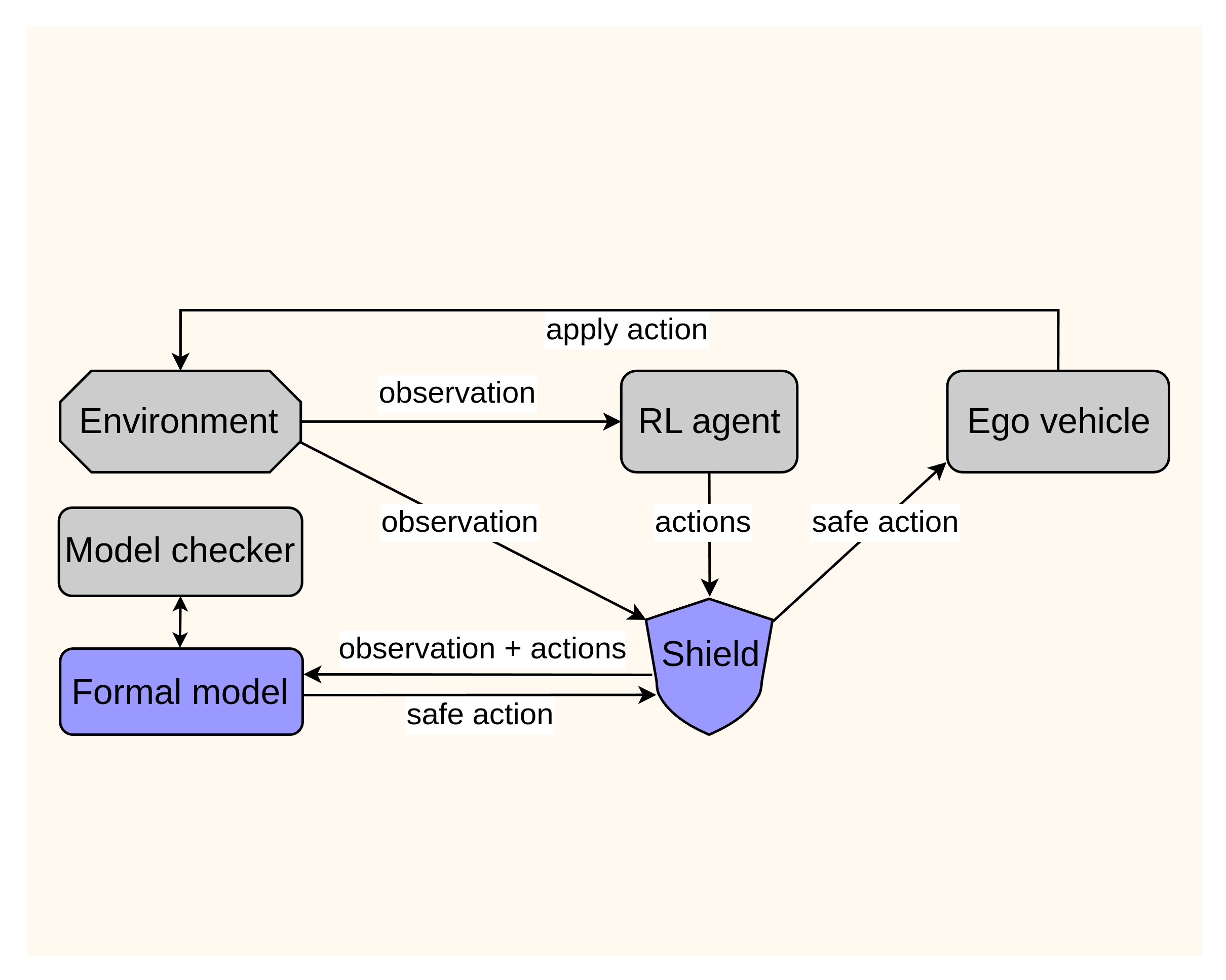
We propose leveraging online model checking to develop a safety shield for autonomous driving.